
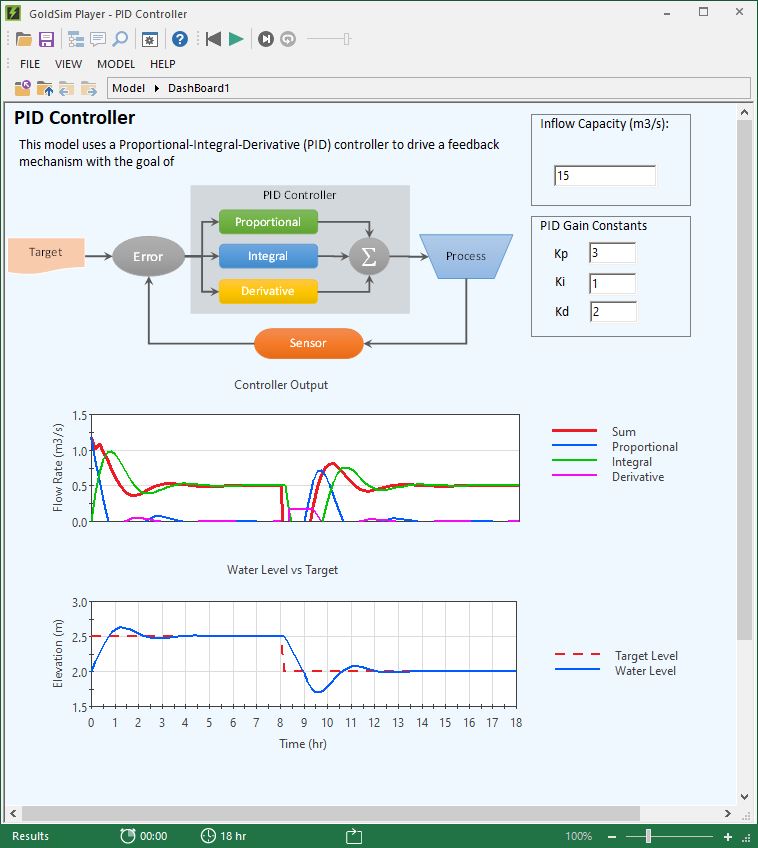
This model uses a proportional-integral-derivative controller (PID) to calculate inflow to a cylindrical water tank. This controller continuously calculates the error value taken as the difference between some setpoint (or target value) and the current output value of the process being controlled. In this case, it is a cylindrical water tank that is delivering water to an independent water demand. To supplement this supply, the controller feeds water into the tank based on a flow rate that is calculated by the PID controller. You operate the controller by adjusting the 3 gain constants; one for each output: proportional, integral, and derivative. You can tune the model by adjusting these gain constants in the dashboard.
Download the Model File:
Comments
0 comments
Please sign in to leave a comment.